7Semi BNO055 9-DOF Absolute Orientation Sensor Breakout: Precise Movement Tracking for Your Projects
Unparalleled Orientation Sensing for Robotics, Drones, and IoT
The 7Semi BNO055 9-DOF Absolute Orientation Sensor Breakout delivers exceptional precision and stability for your most demanding orientation-based applications. This intelligent sensor combines a best-in-class Bosch BNO055 chip with an I2C interface for seamless integration into any project or system.
Powerful Features, Superior Performance
- 9-Axis Absolute Orientation: Precisely track movement and orientation in 3D space with an accelerometer, gyroscope, and magnetometer.
- Bosch BNO055 Smart Sensor: Combines a tri-axis accelerometer, gyroscope, and magnetometer for reliable measurements of acceleration, angular rate, and magnetic field strength.
- Advanced Sensor Fusion: Sophisticated algorithms ensure unmatched accuracy and stability in orientation data.
- I2C Interface: Effortlessly integrate the sensor into your project using the widely-supported I2C communication protocol.
- Wide Operating Voltage: Compatible with a variety of systems thanks to its 3.3V and 5.0V operating voltage range.
- Low Power Consumption: Extended battery life for portable projects.
- Compact Design: Easily incorporate the sensor into space-constrained applications.
Seamless Integration
- I2C Interface: Provides straightforward integration into various microcontrollers and development platforms.
- Multiple Address Options: Supports I2C addresses 0x28 (default) and 0x29 for flexible configuration.
Extensive Data Acquisition
-
Absolute Orientation (Euler & Quaternion): Obtain three-axis orientation data for comprehensive analysis.
-
Angular Velocity & Acceleration Vectors: Track rotation speed and linear acceleration with ease.
-
Magnetic Field Strength & Gravity Vectors: Gain valuable insights into magnetic fields and gravitational forces.
-
Temperature Sensor: Monitor ambient temperature for additional project context.
Key Features
-
Absolute Orientation (Euler Vector, 100Hz) Three axis orientation data based on a 360 degree sphere
-
Absolute Orientation (Quaterion, 100Hz) Four point quaternion output for more accurate data manipulation
-
Angular Velocity Vector (100Hz) Three axis of 'rotation speed' in rad/s
-
Acceleration Vector (100Hz) Three axis of acceleration (gravity + linear motion) in m/s^2
-
Magnetic Field Strength Vector (20Hz) Three axis of magnetic field sensing in micro Tesla (uT)
-
Linear Acceleration Vector (100Hz) Three axis of linear acceleration data (acceleration minus gravity) in m/s^2
-
Gravity Vector (100Hz) Three axis of gravitational acceleration (minus any movement) in m/s^2
-
Accelerometer, Gyroscope, Magnetometer, 9 Axis Sensor I2C
-
Temperature (1Hz) Ambient temperature in degrees celsius
-
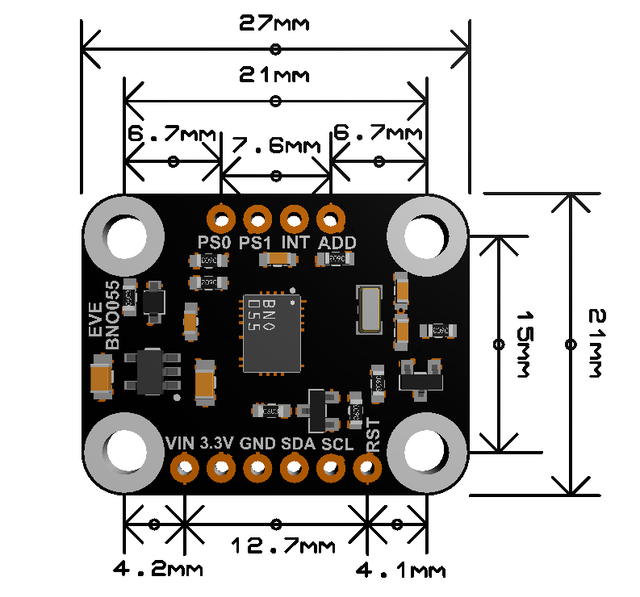
Dimensions: 21mm x 27mm x 4mm
-
Uses I2C address 0x28 (default) or 0x29
Upgrade your project today with the 7Semi BNO055 9-DOF Absolute Orientation Sensor Breakout and experience the difference superior technology can make!
STEMMA QT / Qwiic 4-pin 1mm Pitch White Female Connector Cable 150mm Long - Both Side can be purchased seperately.
The Bosch BNO055 is an intelligent 9-DOF (degrees of freedom) absolute sensor that provides precise and accurate data for orientation sensing. It combines an accelerometer, gyroscope, and magnetometer with a sophisticated fusion algorithm that calculates orientation data with unparalleled accuracy and stability. The BNO055 is designed to operate at a wide range of voltages, making it compatible with a variety of systems. With its advanced features and superior technology, the Bosch BNO055 is widely regarded as one of the best absolute orientation sensors available on the market today.
Kit Contents
-
BNO055 breakout
-
1x6 male header
-
1x4 male header
Resources
7Semi BNO055 9-DOF Orientation Sensor Breakout I2C Connections to Arduino
7Semi BNO055 Orientation Sensor Breakout Dimensions
A 9-DOF Absolute Orientation Sensor is a smart sensor that combines a tri-axis accelerometer, tri-axis gyroscope, and tri-axis magnetometer into a single device. This type of sensor is also known as an Intelligent 9-Axis Absolute Sensor. With these sensors, the device can track orientation and movement in three-dimensional space with high accuracy and precision. The accelerometer measures linear acceleration, the gyroscope measures angular velocity, and the magnetometer measures the orientation of the device relative to the earth's magnetic field. By combining these measurements, the 9-DOF Absolute Orientation Sensor can determine the absolute orientation of an object in space. This type of sensor is commonly used in applications such as robotics, drones, virtual reality, and augmented reality.













